




Технология захвата движения, для оценки здоровья лошадей
Скорость является важным параметром в биомеханическом анализе и общих исследованиях локомоции. Оценить скорость можно с помощью систем глобального позиционирования (GPS) или технологии захвата движения (Motion Capture -«мокап») на инерциальных бесконтактных датчиках положения в пространстве (IMU). Однако GPS требует постоянного подключения сигнала к спутникам, и ошибки накапливаются во время интеграции этих сигналов. В попытке преодолеть эти проблемы учёные исследовали возможность оценки скорости лошади путём разработки моделей машинного обучения (ML) с использованием сигналов от семи встроенных датчиков IMU, закреплённых на разных частях тела лошади (крестец, холка, голова и конечности).
Поскольку паттерны движений, извлечённые из сигналов, различаются у разных пород и аллюров, пришлось обучать модели на основе данных, полученных от каждой из пород, во время ходьбы, рыси, тельта, темпа и галопа. Модели оценивались по походке и сравнивались между алгоритмами искусственного интеллекта и местоположением IMU. Сейчас в конном спорте уже широко используются высокоточные модели на основе машинного обучения, разработанные для оценки скорости лошади, динамики её развития, раннего выявления патологии в походке и других задач. Искусственный интеллект позволяет извлекать нужные денные, независимо от точности (одинаковости) расположения датчиков на теле и аллюра.
Контроль за правильностью походки является ключевой переменной для анализа передвижения лошади и оценки производительности в динамике её роста. Влияние скорости на кинематические и кинетические параметры, а также показатели здоровья изучалось в различных областях, связанных с лошадьми, включая профилактику травм во время физических упражнений, выявление хромоты, оценку уровня физической подготовки и геномный анализ. Таким образом, всесторонняя оценка лошади важна, поскольку она помогает клиницистам и наездникам иметь всестороннее представление об уровне здоровья и физической подготовки лошади.
В целом, ранее эти факторы оценивались путём визуального наблюдения и маркировки в относительных единицах (например, медленно и быстро). На относительное описание параметров передвижения может влиять предвзятость ожиданий, и точность зависит от опыта оценщика. В качестве решения они должны быть измерены количественно, чтобы стать сопоставимыми.
Существовали различные методы измерения скорости и локомоции животных с использованием устройств. Обычно для этой цели используются высокоскоростные камеры. Однако камера должна быть закреплена на стене или земле, требует масштабирования и захватывает только ограниченную область. Трёхмерный оптический захват движения также использовался для оценки. И хотя этот метод считается «золотым стандартом» для анализа кинематики походки, он весьма дорогостоящий и сильно зависит от условий правильной установки камер и опытности операторов. По этим причинам их использование ограниченно.
В отличие от ограничений вышеуказанных методов, инерциальные измерительные устройства (IMU) могут количественно определять характер движения внутри и снаружи помещений. Эта технология использовалась для анализа движений человека, способна точно измерять ускорение и угловую скорость любого органа тела или элемента в трёхмерном пространстве. По сути, интеграция сигнала ускорения приводит к измерению скорости в любой момент времени. Однако на практике совокупность ошибок в процессе интеграции может проявляться в виде накопленного отклонения от реального значения с течением времени.
Другим портативным устройством для измерения скорости является глобальная система позиционирования (GPS). Это устройство было проверено на точность измерения скорости в исследованиях на людях и лошадях. Преимуществом использования GPS является портативность и низкая цена. Однако его нельзя использовать в помещении из-за сильных помех или отсутствия принимаемых сигналов со спутников. Точность также может снизиться на открытом воздухе, если соединению мешают большие препятствия.
Используя скорость GPS в качестве ориентира, а IMU для точности измерений, можно было бы более точно оценивать необходимые параметры. Однако данные IMU имеют высокую размерность, что усложняет возможное подключение к одномерным скалярным данным. Машинное обучение (ML) может решить эту проблему, обрабатывая нелинейные и многомерные данные в единую оптимизированную модель.
Поскольку породы лошадей, как и сами представители одной породы, отличаются друг от друга биомеханически и демонстрируют разные модели движения, при моделировании используют данные о движении множества животных, в разных темпах движения. Например, в построении одной из моделей для ветеринарного мониторинга, были собраны данные о пятнадцати исландских лошадях, на которых ездили шагом, рысью, тельтом, темпом и галопом, чтобы изучить нормальные биомеханические свойства различных аллюров.
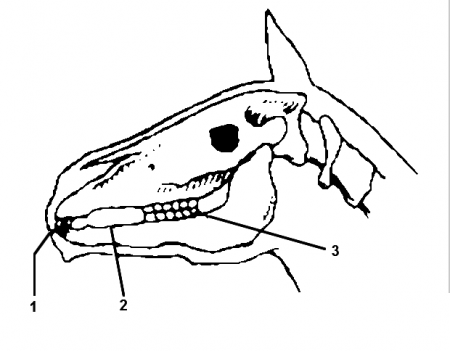
В другом случае исследовали двадцать пять лошадей породы Франш-Монтань, которых выгуливали и пускали рысью, чтобы изучить локомоцию и ассоциации фенотип-генотип. В обеих этих работах лошади были оснащены одной и той же системой анализа походки (EquiMoves®), состоящий из семи трёхосных акселерометров гироскопов (ProMove-mini IMU) на затылке, холке, крестце и боковой стороне всех четырёх конечностей. Датчики IMU были настроены на частоту дискретизации 200 Гц. Лошади с известной историей хромоты или проявлявшие какие-либо явные признаки хромоты во время измерений были исключены из наблюдений, но их потом всё равно задействовали, занеся информацию в другую базу данных с патологиями.
Специальный модуль GPS был разработан для точного измерения скорости (погрешность менее 0,01 м/с при значении скорости 30 м/с) с использованием метода доплеровского сдвига. Для подтверждения точности модуль тестируется и валидируется для измерения скорости на открытом воздухе, после чего также закрепляется на холке или крестце (поскольку они являются наиболее чёткой точкой тела лошади для приёма сигналов спутников).
Сигналы, полученные от IMU (оси ускорения и угловой скорости по трём осям x, y и z), подвергаются низкочастотной фильтрации для уменьшения шума в данных. Затем отфильтрованные сигналы преобразуются с временной дискретизацией в 256 шагов/секунду, после чего эти данные синхронизируются по времени с соответствующими данными спутникового позиционирования скорости. Поскольку данные о скорости от GPS собираются каждые 0,2 с (5 Гц), а частота передачи данных IMU составляет 200 Гц, то временные окна хорошо перекрываются. Некоторые смещения юстировки датчиков IMU, которые неизбежно происходят во время измерений, выявляются и корректируются искусственным интеллектом во время построения модели.
Скорость, полученная из GPS, используется в качестве базовой для сравнения характеристик моделей, обученных по пяти методам машинного обучения. Каждый метод обучается на девяти-одиннадцати наборах признаков, чтобы сравнить точность оценки. Наборы функций состоят из характеристик во временной и частотной областях, извлечённых из данных семи IMU, которые представляют собой обширную базу данных ускорения и угловой скорости у разных здоровых животных. Кроме того, по каждой лошади, участвующей в построении моделей, заносятся дополнительные данные: пол, возраст, физические характеристики и т.п.
В дальнейшем, все эти выстроенные модели, будучи помещёнными на сервера в дата-центре, к которым будет доступ для всех заинтересованных сторон, позволят точно оценить состояние лошади в динамике, во время всех походок, используя выходные сигналы только нескольких инерциальных датчиков (на конечностях + на крестце или холке). Надёжность баз данных по многим породам обеспечивает гибкость использования для ветеринаров, владельцев лошадей, наездников и заводчиков. Они могут извлечь выгоду из точной оценки скорости на тренировках и соревнованиях, а также раннего выявления хромоты, патологий, травм, возрастных изменений. Производительность/полезность моделей постоянно пополняется новыми данными, включающими в себя описательные корректировки патологий после детального обследования животных.








Комментарии (0)
Добавить комметарий